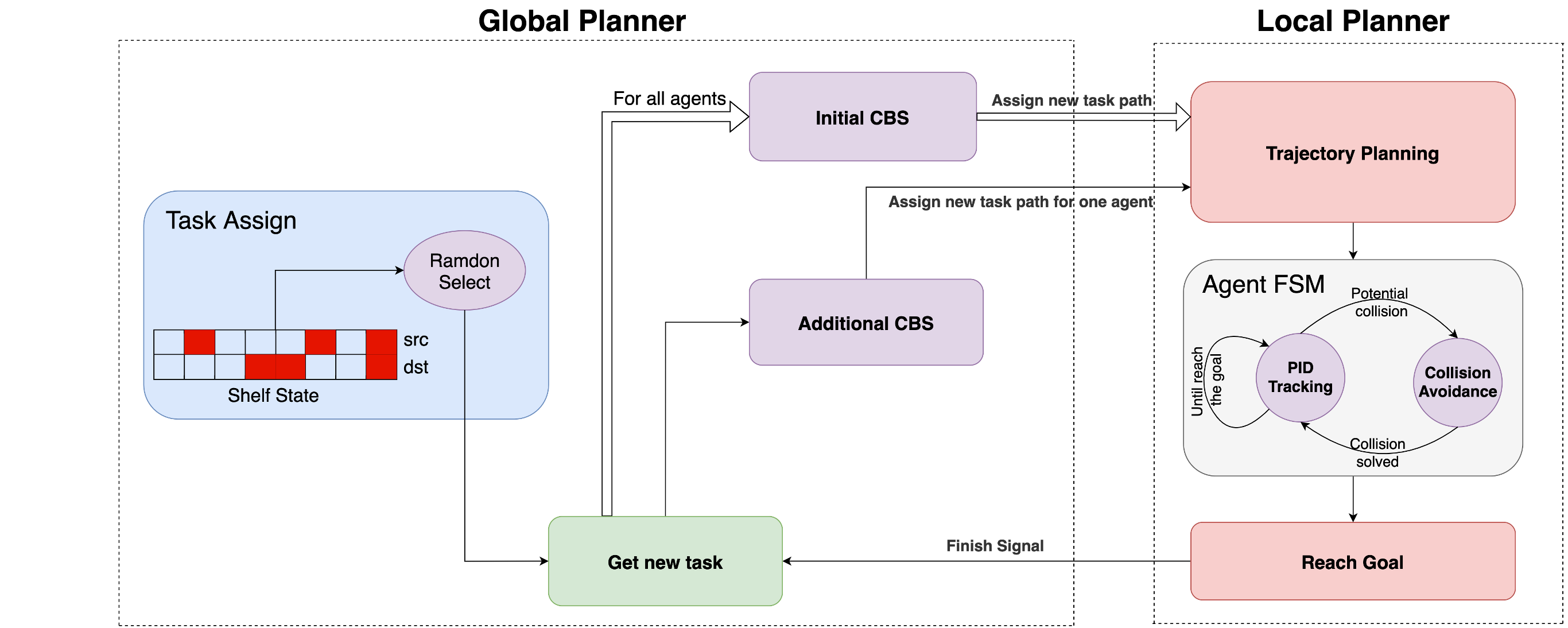
Lifelong Multi-Agent Path Finding (MAPF)
- Established physical simulation on Webots and implemented PID controller for robot trajectory tracking.
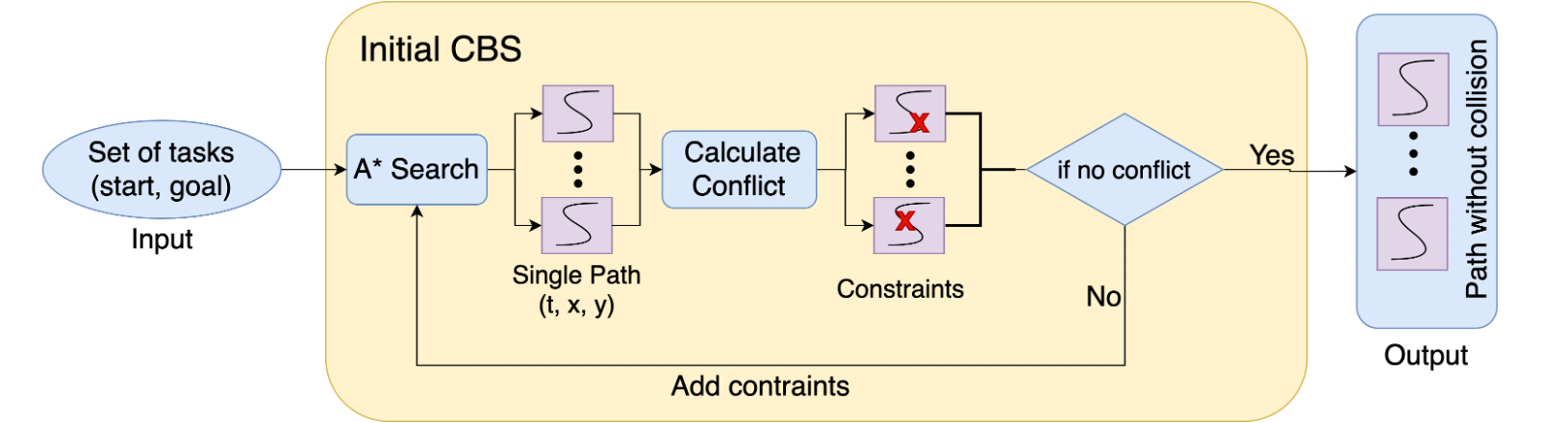
- Proposed an improved bi-directional A* to avoid potential collision caused by imperfect controller trajectory, and a centralized two-stage Conflict-Based Search(CBS) algorithm to complete the lifelong MAPF task.